ZTE Communications ›› 2023, Vol. 21 ›› Issue (2): 80-87.DOI: 10.12142/ZTECOM.202302011
• Special Topic • Previous Articles Next Articles
LI Yuting1,, DING Yi2, GAO Jiangchuan1, LIU Yusha1( ), HU Jie1, YANG Kun3
), HU Jie1, YANG Kun3
Received:2023-02-11
Online:2023-06-13
Published:2023-06-13
About author:LI Yuting is with the University of Electronic Science and Technology of China. Her current research interests include data and energy integrated communication networks and machine learning.|LIU Yusha (LI Yuting, DING Yi, GAO Jiangchuan, LIU Yusha, HU Jie, YANG Kun. UAV Autonomous Navigation for Wireless Powered Data Collection with Onboard Deep Q-Network[J]. ZTE Communications, 2023, 21(2): 80-87.
Add to citation manager EndNote|Ris|BibTeX
URL: https://zte.magtechjournal.com/EN/10.12142/ZTECOM.202302011
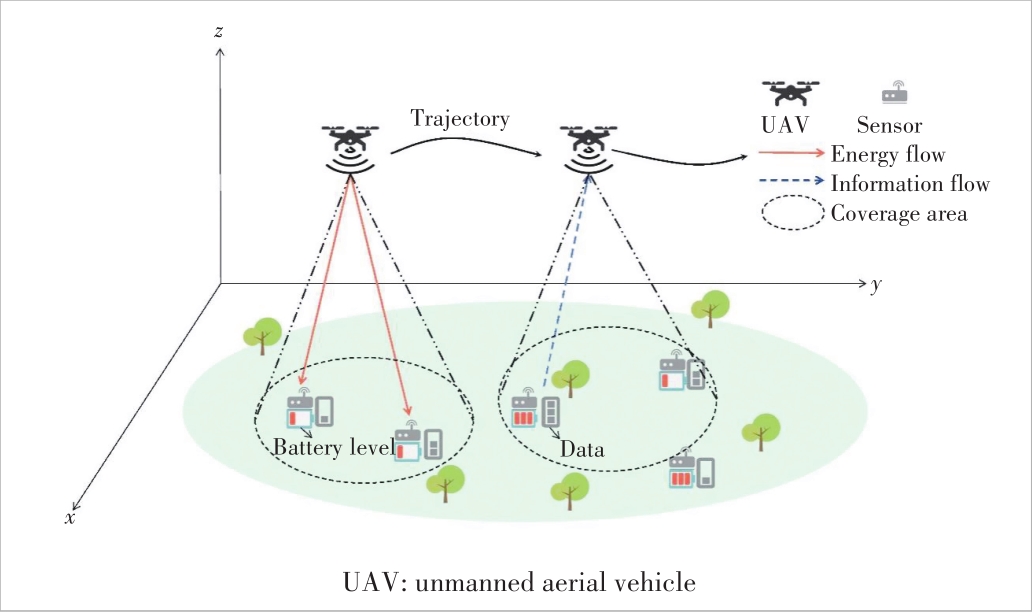
Figure 1 A UAV-assisted rechargeable wireless sensor network (WSN)
| Notation | Definition |
|---|---|
| Sensor index, number of ground sensors | |
| Time slot index, total UAV flight time slots | |
| Time slot duration, total UAV flight time | |
| Coordinate of the k-th sensor | |
| Velocity of the UAV at the t-th time slot | |
| Position of the UAV at the t-th time slot | |
| Distance between sensor | |
| Channel gain between sensor | |
| The coverage range of the UAV | |
| Battery level of the k-th sensor | |
| Operation mode factor of sensor | |
| Transmit power of the UAV and ground sensors |
Table 1 Notation list
| Notation | Definition |
|---|---|
| Sensor index, number of ground sensors | |
| Time slot index, total UAV flight time slots | |
| Time slot duration, total UAV flight time | |
| Coordinate of the k-th sensor | |
| Velocity of the UAV at the t-th time slot | |
| Position of the UAV at the t-th time slot | |
| Distance between sensor | |
| Channel gain between sensor | |
| The coverage range of the UAV | |
| Battery level of the k-th sensor | |
| Operation mode factor of sensor | |
| Transmit power of the UAV and ground sensors |
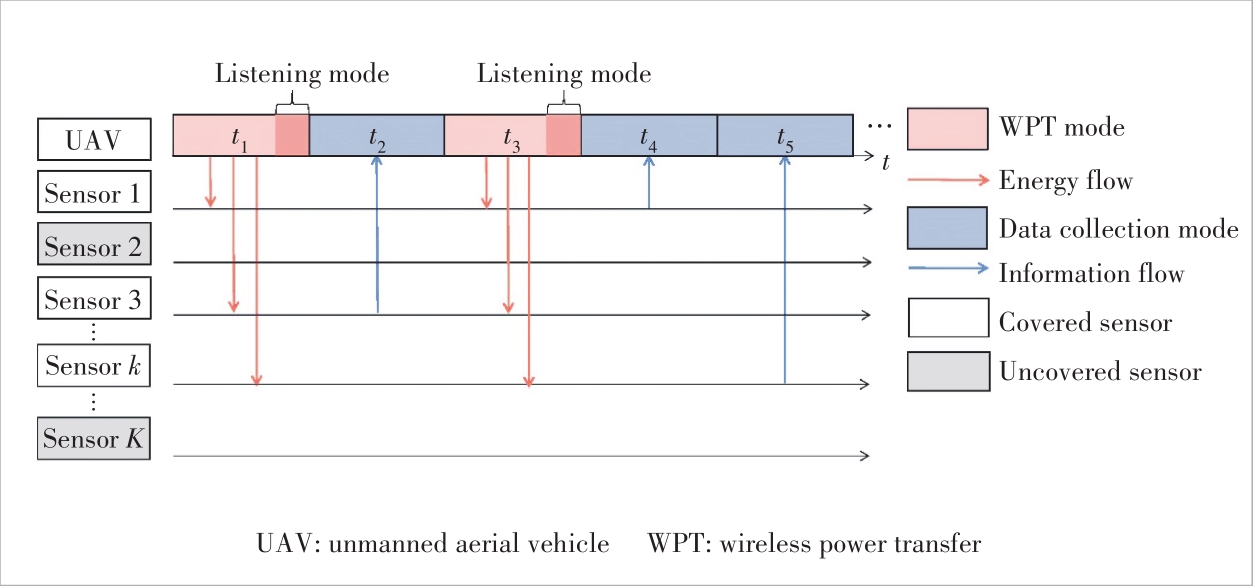
Figure 2 Communication protocol for a UAV-assisted wireless sensor network
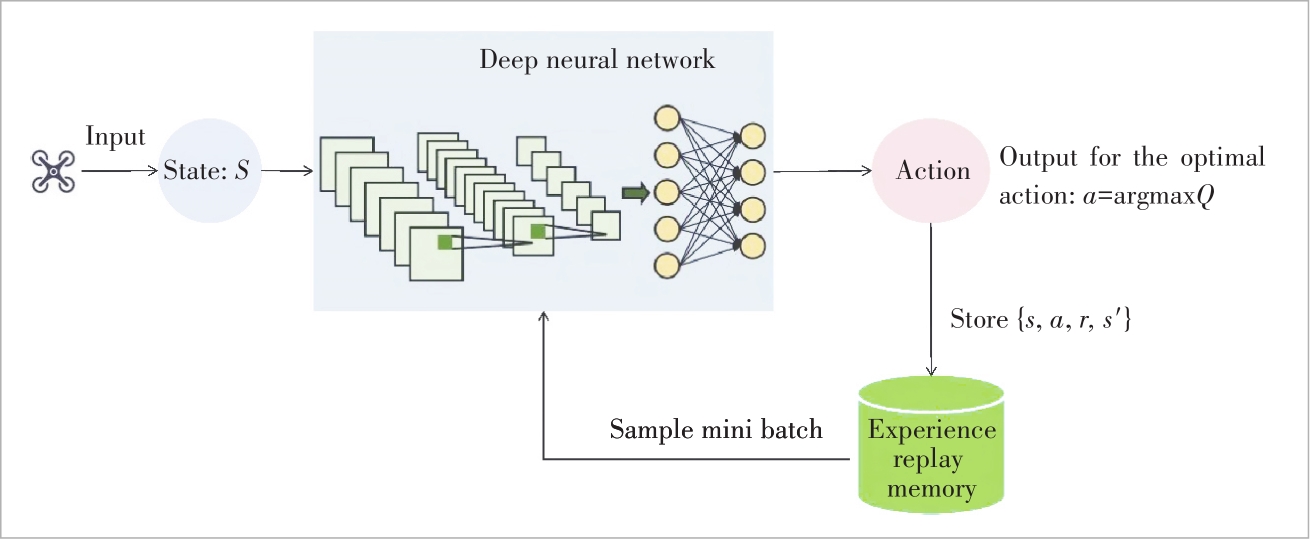
Figure 3 Schematics of the proposed algorithm
| DNN Parameters | Value |
|---|---|
| Learning rate | 0.000 1 |
| Discount factor | 0.9 |
| Replay memory size | 10 000 |
| Batch size | 32 |
| ReLu hidden neurons | 20 |
| Number of neural network layers | 2 |
Table 2 Simulation parameters: DNN
| DNN Parameters | Value |
|---|---|
| Learning rate | 0.000 1 |
| Discount factor | 0.9 |
| Replay memory size | 10 000 |
| Batch size | 32 |
| ReLu hidden neurons | 20 |
| Number of neural network layers | 2 |
| System Parameters | Value |
|---|---|
| Bandwidth | 1 MHz |
| Energy conversion efficiency | 0.9 |
| Noise power | -60 dBm |
| Flying height | 10 m |
| Coverage area | 70 m2 |
| Steering angle | |
| Flying velocity |
Table 3 System parameters
| System Parameters | Value |
|---|---|
| Bandwidth | 1 MHz |
| Energy conversion efficiency | 0.9 |
| Noise power | -60 dBm |
| Flying height | 10 m |
| Coverage area | 70 m2 |
| Steering angle | |
| Flying velocity |
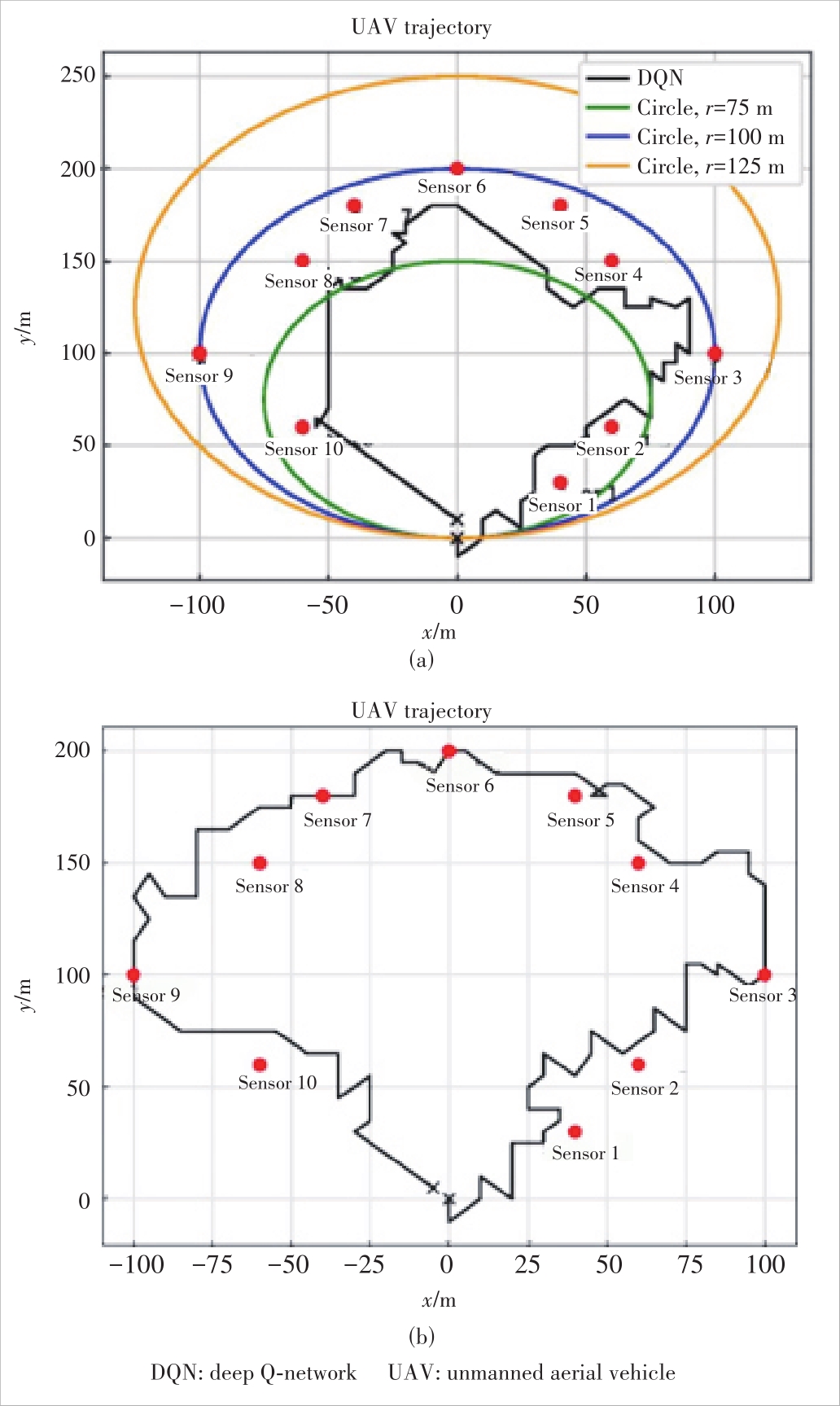
Figure 4 UAV’s trajectory under different flight time: (a) 2 000 s and (b) 4 000 s

Figure 5 Energy and data traffic of k=1.5 and 10 ground sensors: (a) battery and (b) data traffic

Figure 6 Comparison of average data traffic per sensor by DQN and three circular trajectories
| 1 |
HU J, WANG Q, YANG K. Energy self-sustainability in full-spectrum 6G [J]. IEEE wireless communications, 2021, 28(1): 104–111. DOI: 10.1109/MWC.001.2000156
DOI |
| 2 |
WU D P, HE J, WANG H G, et al. A hierarchical packet forwarding mechanism for energy harvesting wireless sensor networks [J]. IEEE communications magazine, 2015, 53(8): 92–98. DOI: 10.1109/MCOM.2015.7180514
DOI |
| 3 |
GHARIBI M, BOUTABA R, WASLANDER S L. Internet of drones [J]. IEEE access, 2016, 4: 1148–1162. DOI: 10.1109/ACCESS.2016.2537208
DOI |
| 4 |
ZHU S C, GUI L, CHENG N, et al. Joint design of access point selection and path planning for UAV-assisted cellular networks [J]. IEEE Internet of Things journal, 2020, 7(1): 220–233. DOI: 10.1109/JIOT.2019.2947718
DOI |
| 5 |
GHORBEL M BEN, RODRÍGUEZ-DUARTE D, GHAZZAI H, et al. Joint position and travel path optimization for energy efficient wireless data gathering using unmanned aerial vehicles [J]. IEEE transactions on vehicular technology, 2019, 68(3): 2165–2175. DOI: 10.1109/TVT.2019.2893374
DOI |
| 6 |
HU J, CAI X P, YANG K. Joint trajectory and scheduling design for UAV aided secure backscatter communications [J]. IEEE wireless communications letters, 2020, 9(12): 2168–2172. DOI: 10.1109/LWC.2020.3016174
DOI |
| 7 |
XIE L F, XU J, ZHANG R. Throughput maximization for UAV-enabled wireless powered communication networks [J]. IEEE Internet of Things journal, 2019, 6(2): 1690–1703. DOI: 10.1109/JIOT.2018.2875446
DOI |
| 8 | MNIH V, KAVUKCUOGLU K, SILVER D, et al. Playing atari with deep reinforcement learning [EB/OL]. [2023-03-10]. |
| 9 |
LI K, NI W, TOVAR E, et al. On-board deep Q-network for UAV-assisted online power transfer and data collection [J]. IEEE transactions on vehicular technology, 2019, 68(12): 12215–12226. DOI: 10.1109/TVT.2019.2945037
DOI |
| 10 |
TANG J, SONG J R, OU J H, et al. Minimum throughput maximization for multi-UAV enabled WPCN: A deep reinforcement learning method [J]. IEEE access, 2020, 8: 9124–9132. DOI: 10.1109/ACCESS.2020.2964042
DOI |
| 11 |
LIU C H, CHEN Z Y, TANG J, et al. Energy-efficient UAV control for effective and fair communication coverage: a deep reinforcement learning approach [J]. IEEE journal on selected areas in communications, 2018, 36(9): 2059–2070. DOI: 10.1109/JSAC.2018.2864373
DOI |
| 12 |
LU Y P, XIONG G, ZHANG X, et al. Uplink throughput maximization in UAV-aided mobile networks: a DQN-based trajectory planning method [J]. Drones, 2022, 6(12): 378. DOI: 10.3390/drones6120378
DOI |
| 13 |
ABEDIN S F, MUNIR M S, TRAN N H, et al. Data freshness and energy-efficient UAV navigation optimization: a deep reinforcement learning approach [J]. IEEE transactions on intelligent transportation systems, 2021, 22(9): 5994–6006. DOI: 10.1109/TITS.2020.3039617
DOI |
| 14 |
ZHANG T K, LEI J Y, LIU Y W, et al. Trajectory optimization for UAV emergency communication with limited user equipment energy: a safe-DQN approach [J]. IEEE transactions on green communications and networking, 2021, 5(3): 1236–1247. DOI: 10.1109/TGCN.2021.3068333
DOI |
| 15 |
LI K, NI W, TOVAR E, et al. Joint flight cruise control and data collection in UAV-aided Internet of Things: an onboard deep reinforcement learning approach [J]. IEEE Internet of Things journal, 2021, 8(12): 9787–9799. DOI: 10.1109/JIOT.2020.3019186
DOI |
| [1] | WEI Zhiqing, ZHANG Yongji, JI Danna, LI Chenfei. Sensing and Communication Integrated Fast Neighbor Discovery for UAV Networks [J]. ZTE Communications, 2024, 22(3): 69-82. |
| [2] | ZHAO Yaqiong, KE Hongqin, XU Wei, YE Xinquan, CHEN Yijian. RIS-Assisted Cell-Free MIMO: A Survey [J]. ZTE Communications, 2024, 22(1): 77-86. |
| [3] | YANG Bo, MITANI Tomohiko, SHINOHARA Naoki, ZHANG Huaiqing. High-Power Simultaneous Wireless Information and Power Transfer: Injection-Locked Magnetron Technology [J]. ZTE Communications, 2022, 20(2): 3-12. |
| [4] | CHANG Mingyang, HAN Jiaqi, MA Xiangjin, XUE Hao, WU Xiaonan, LI Long, CUI Tiejun. Programmable Metasurface for Simultaneously Wireless Information and Power Transfer System [J]. ZTE Communications, 2022, 20(2): 48-62. |
| [5] | LI Xiuxian, LI Zhetao, OUYANG Yan, DUAN Haohua, XIANG Liyao. Using UAV to Detect Truth for Clean Data Collection in Sensor‑Cloud Systems [J]. ZTE Communications, 2021, 19(3): 30-45. |
| [6] | LIN Xinhua, ZHANG Jing, LI Qiang. Cluster Head Selection Algorithm for UAV Assisted Clustered IoT Network Utilizing Blockchain [J]. ZTE Communications, 2021, 19(1): 30-38. |
| [7] | Mohammed SEID, Stephen ANOKYE, SUN Guolin. Machine Learning Based Unmanned Aerial Vehicle Enabled Fog-Radio Aerial Vehicle Enabled Fog-Radio Access Network and Edge Computing [J]. ZTE Communications, 2019, 17(4): 33-45. |
| [8] | Stephen ANOKYE, Mohammed SEID, SUN Guolin. A Survey on Machine Learning Based Proactive Caching [J]. ZTE Communications, 2019, 17(4): 46-55. |
| [9] | LI Tongxin, SHENG Min, LYU Ruiling, LIU Junyu, LI Jiandong. UAV Assisted Heterogeneous Wireless Networks: Potentials and Challenges [J]. ZTE Communications, 2018, 16(2): 3-8. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||

