ZTE Communications ›› 2019, Vol. 17 ›› Issue (2): 2-9.DOI: 10.12142/ZTECOM.201902002
• Special Topic • Previous Articles Next Articles
Received:2019-04-10
Online:2019-06-11
Published:2019-11-14
About author:Erich Z?chmann (Supported by:Zöchmann Erich. A Framework for Active Learning of Beam Alignment in Vehicular Millimeter Wave Communications by Onboard Sensors[J]. ZTE Communications, 2019, 17(2): 2-9.
Add to citation manager EndNote|Ris|BibTeX
URL: https://zte.magtechjournal.com/EN/10.12142/ZTECOM.201902002

Figure 1. Active learning example. The estimated state vectors of the communication link (green crosses) label the data from other sensors as a valid MPC. Therby active learning of possible beam direction from other sensors is rendered possible.
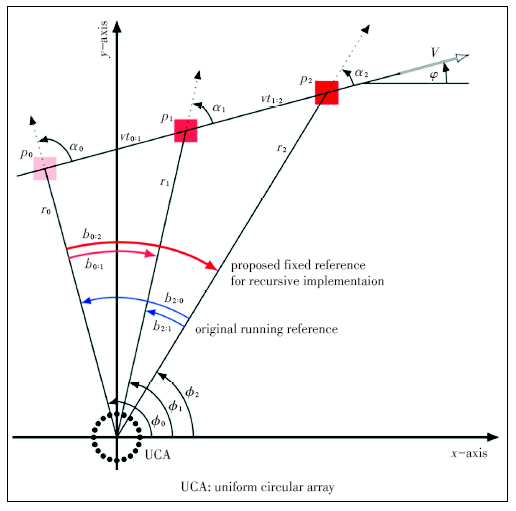
Figure 2. Geometric relationship of all variables used for the algorithm. The MPC to track is marked as squqre. The employed array geometry (uniform circular array) is sketched as well.
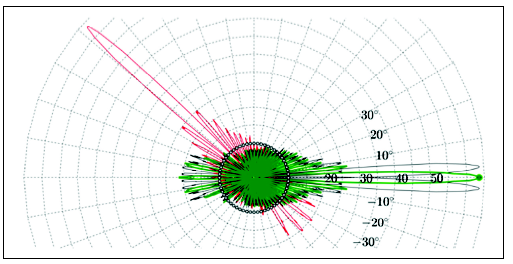
Figure 3. Beampattern of the proposed uniform circular array with N=64 elements and 4 bit quantization of all steering vectors. The desired array pattern is marked in green; the array factor for this direction (0°) is marked with a green dot; the neighbouring codebook pattern are drawn in black. The uniform circular array (UCA) pattern is inherently symmetric for all directions; illustrated by the red pattern pointing in opposite direction.
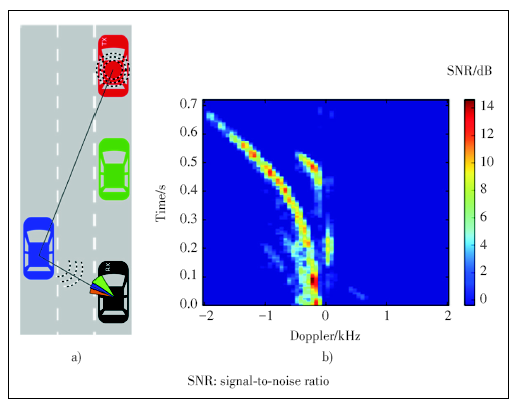
Figure 4. Blocked manoeuvre: a) sketch of the scenario. The green car block a direct communications between the red TX and black RX car; b) the Doppler shift estimate for this scenario obtained from a real world experiment in [9] and [23].
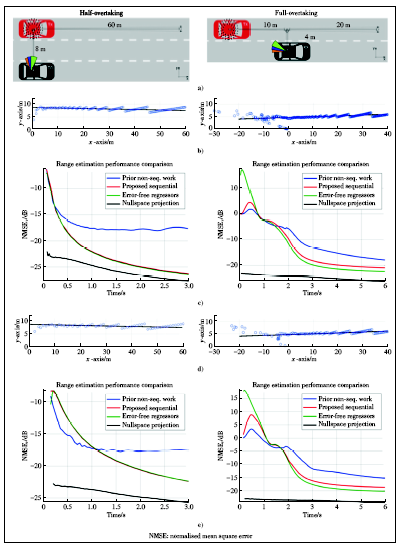
Figure 5. a) Manoeuvre sketch of the scenarios; b) exemplary relative position estimates (x,y) of the proposed estimator with 20 ms update rate; c) range normalized mean squared error comparisons with 20 ms update rate; d) (x,y) estimates with 50 ms update rate; e) NMSE with 50 ms update rate.
| [1] | AKIHITO K, KATSUYOSHI S, FUJISE M , et al. Propagation Characteristics of 60-GHz Millimeter Waves for ITS Inter-Vehicle Communications[J]. IEICE Transactions on Communications, 2001,84(9):2530-2539 |
| [2] | MEINEL H, PLATTNER A . Millimeter-Wave Propagation along Railway Lines[J]. IEE Proceedings F (Communications, Radar and Signal Processing), 1983,130(7):688. DOI: 10.1049/ip-f-1.1983.0102 |
| [3] | VA V, SHIMIZU T, BANSAL G , et al. Millimeter Wave Vehicular Communications: A Survey[J]. Foundations and Trends in Networking, 2016,10(1):1-113. DOI: 10.1561/1300000054 |
| [4] | KUMARI P, CHOI J, GONZALEZ-PRELCIC N , et al. IEEE 802.11ad-Based Radar: An Approach to Joint Vehicular Communication-Radar System[J]. IEEE Transactions on Vehicular Technology, 2018,67(4):3012-3027. DOI: 10.1109/tvt.2017.2774762 |
| [5] | CHOI J, VA V, GONZALEZ-PRELCIC N , et al. Millimeter-Wave Vehicular Communication to Support Massive Automotive Sensing[J]. IEEE Communications Magazine, 2016,54(12):160-167. DOI: 10.1109/mcom.2016.1600071cm |
| [6] | LORCA J, HUNUKUMBURE M, WANG Y. On Overcoming the Impact of Doppler Spectrum in Millimeter-Wave V2I Communications [C]//2017 IEEE Globecom Workshops. Singapore, Singapore, 2017: 1-6. DOI: 10.1109/GLOCOMW.2017.8269039 |
| [7] | VA V, CHOI J, HEATH R W . The Impact of Beamwidth on Temporal Channel Variation in Vehicular Channels and Its Implications[J]. IEEE Transactions on Vehicular Technology, 2017,66(6):5014-5029. DOI: 10.1109/tvt.2016.2622164 |
| [8] | ZÖCHMANN E, HOFER M, LERCH M, et al. Statistical Evaluation of Delay and Doppler Spread in 60 GHz Vehicle-To-Vehicle Channels during Overtaking [C]//2018 IEEE-APS Topical Conference on Antennas and Propagation in Wireless Communications (APWC), Cartagena des Indias, Colombia, 2018: 1-4. DOI: 10.1109/APWC.2018.8503750 |
| [9] | ZOCHMANN E, HOFER M, LERCH M , et al. Position-Specific Statistics of 60 GHz Vehicular Channels during Overtaking[J]. IEEE Access, 2019,7:14216-14232. DOI: 10.1109/access.2019.2893136 |
| [10] | GAO X Y, DAI L L, ZHANG Y , et al. Fast Channel Tracking for Terahertz Beamspace Massive MIMO Systems[J]. IEEE Transactions on Vehicular Technology, 2017,66(7):5689-5696. DOI: 10.1109/tvt.2016.2614994 |
| [11] | JAYAPRAKASAM S, MA X X, CHOI J W , et al. Robust Beam-Tracking for mmWave Mobile Communications[J]. IEEE Communications Letters, 2017,21(12):2654-2657. DOI: 10.1109/lcomm.2017.2748938 |
| [12] | LI J H, SUN Y, XIAO L M, et al. Analog Beam Tracking in Linear Antenna Arrays: Convergence, Optimality, and Performance [C]//51st Asilomar Conference on Signals, Systems, and Computers. Pacific Grove, USA, 2017: 1193-1198. DOI: 10.1109/ACSSC.2017.8335540 |
| [13] | LI J H, SUN Y, XIAO L M, et al. Super Fast Beam Tracking in Phased Antenna Arrays: Theory and Performance[EB/OL]. (2017-10-22). |
| [14] | LI J H, SUN Y, XIAO L M, et al. How to Mobilize Mmwave: A Joint Beam and Channel Tracking Approach[C]//IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Calgary, Canada, 2018: 3624-3628. DOI: 10.1109/ICASSP.2018.8461760 |
| [15] | LOCH A, ASADI A, SIM G H, et al. Mm-Wave on Wheels: Practical 60 GHz Vehicular Communication without Beam Training [C]//9th International Conference on Communication Systems and Networks (COMSNETS). Bangalore, India, 2017: 1-8. DOI: 10.1109/COMSNETS.2017.7945351 |
| [16] | PALACIOS J, DE DONNO D, WIDMER J. Tracking mm-Wave Channel Dynamics: Fast Beam Training Strategies under Mobility [C]//IEEE Conference on Computer Communications (INFOCOM). Atlanta, USA, 2017: 1-9. DOI: 10.1109/INFOCOM.2017.8056991 |
| [17] | RODRÍGUEZ-FERNÁNDEZ J, GONZÁIEZ-PRELCIC N, HEATH R W. Frequency-Domain Wideband Channel Estimation and Tracking for Hybrid MIMO Systems [C]//51st Asilomar Conference on Signals, Systems, and Computers. Pacific Grove, USA, 2017: 1829-1833. DOI: 10.1109/ACSSC.2017.8335678 |
| [18] | VA V, VIKALO H, HEATH R W. Beam Tracking for Mobile Millimeter Wave Communication Systems [C]//IEEE Global Conference on Signal and Information Processing (GlobalSIP). Washington, DC, USA, 2016: 743-747. DOI: 10.1109/GlobalSIP.2016.7905941 |
| [19] | ZHANG C, GUO D N, FAN P Y. Tracking Angles of Departure and Arrival in a Mobile Millimeter Wave Channel [C]//IEEE International Conference on Communications (ICC). Kuala Lumpur, Malaysia, 2016: 1-6. DOI: 10.1109/ICC.2016.7510902 |
| [20] | ZHAO J W, GAO F F, JIA W M , et al. Angle Domain Hybrid Precoding and Channel Tracking for Millimeter Wave Massive MIMO Systems[J]. IEEE Transactions on Wireless Communications, 2017,16(10):6868-6880. DOI: 10.1109/twc.2017.2732405 |
| [21] | ZHOU Y F, YIP P C, LEUNG H . Tracking the Direction-Of-Arrival of Multiple Moving Targets by Passive Arrays: Algorithm[J]. IEEE Transactions on Signal Processing, 1999,47(10):2655-2666. DOI: 10.1109/78.790648 |
| [22] | ZÖCHMANN E, CABAN S, LERCH M, et al. Resolving the Angular Profile of 60 GHz Wireless Channels by Delay-Doppler Measurements [C]//IEEE Sensor Array and Multichannel Signal Processing Workshop (SAM). Rio de Janerio, Brazil, 2016: 1-5. DOI: 10.1109/SAM.2016.7569652 |
| [23] | ZÖCHMANN E, MECKLENBRÄUKER C F, LERCH M, et al . Measured Delay and Doppler Profiles of Overtaking Vehicles at 60 GHz[C]//12th European Conference on Antennas and Propagation (EuCAP). London, UK:1-5, 2018. DOI: 10.1049/cp.2018.0470 |
| [24] | ZENG Y, ZHANG R . Millimeter Wave MIMO with Lens Antenna Array: A New Path Division Multiplexing Paradigm[J]. IEEE Transactions on Communications, 2016,64(4):1557-1571. DOI: 10.1109/tcomm.2016.2533490 |
| [25] | CHAN Y T, RUDNICKI S W . Bearings-Only and Doppler-Bearing Tracking Using Instrumental Variables[J]. IEEE Transactions on Aerospace and Electronic Systems, 1992,28(4):1076-1083. DOI: 10.1109/7.165369 |
| [26] | HO K C, CHAN Y T . An Asymptotically Unbiased Estimator for Bearings-Only and Doppler-Bearing Target Motion Analysis[J]. IEEE Transactions on Signal Processing, 2006,54(3):809-822. DOI: 10.1109/tsp.2005.861776 |
| [27] | HO K C, CHAN Y T . Geometric-Polar Tracking from Bearings-Only and Doppler-Bearing Measurements[J]. IEEE Transactions on Signal Processing, 2008,56(11):5540-5554. DOI: 10.1109/tsp.2008.928701 |
| [28] | RAO S K . Pseudo-Linear Estimator for Bearings-Only Passive Target Tracking[J]. IEE Proceedings—Radar, Sonar and Navigation, 2001,148(1):16. DOI: 10.1049/ip-rsn:20010144 |
| [29] | ALIEIEV R, HEHN T, KWOCZEK A , et al. Predictive Communication and Its Application to Vehicular Environments: Doppler-Shift Compensation[J]. IEEE Transactions on Vehicular Technology, 2018,67(8):7380-7393. DOI: 10.1109/tvt.2018.2835662 |
| [30] | GONZALEZ-PRELCIC N, ALI A, VA V , et al. Millimeter-Wave Communication with Out-Of-Band Information[J]. IEEE Communications Magazine, 2017,55(12):140-146. DOI: 10.1109/mcom.2017.1700207 |
| [31] | DANIELS R C, CARAMANIS C M, HEATH R W . Adaptation in Convolutionally Coded MIMO-OFDM Wireless Systems through Supervised Learning and SNR Ordering[J]. IEEE Transactions on Vehicular Technology, 2010,59(1):114-126. DOI: 10.1109/tvt.2009.2029693 |
| [32] | DJOUAMA A, ZÖCHMANN E, PRATSCHNER S, et al. Predicting CSI for Link Adaptation Employing Support Vector Regression for Channel Extrapolation [C]//20th International ITG Workshop on Smart Antennas (WSA 2016). Munich, Germany, 2016: 1-7 |
| [33] | VA V, CHOI J, SHIMIZU T , et al. Inverse Multipath Fingerprinting for Millimeter Wave V2I Beam Alignment[J]. IEEE Transactions on Vehicular Technology, 2018,67(5):4042-4058. DOI: 10.1109/tvt.2017.2787627 |
| [34] | ZÖCHMANN E, VA V, RUPP M, et al. Geometric Tracking of Vehicular mmWave Channels to Enable Machine Learning of Onboard Sensors [C]//2018 IEEE Globecom Workshops. Abu Dhabi, United Arab Emirates, 2018: 1-6. DOI: 10.1109/GLOCOMW.2018.8644440 |
| [35] | TAHAT A, KADDOUM G, YOUSEFI S , et al. A Look at the Recent Wireless Positioning Techniques with a Focus on Algorithms for Moving Receivers[J]. IEEE Access, 2016,4:6652-6680. DOI: 10.1109/access.2016.2606486 |
| [36] | SHAHMANSOORI A, GARCIA G E, DESTINO G , et al. Position and Orientation Estimation through Millimeter-Wave MIMO in 5G Systems[J]. IEEE Transactions on Wireless Communications, 2018,17(3):1822-1835. DOI: 10.1109/twc.2017.2785788 |
| [37] | TRULLENQUE ORTIZ M, et al. Vehicle Tracking Through Vision-Millimeter Wave Doppler Shift Fusion [Z]. to be published at IEEE-APS APWC, 2019. |
| [38] | HOANG M G, DENIS B, HÄRRI J, et al. (2015). Distributed Link Selection and Data Fusion for Cooperative Positioning in GPS-Aided IEEE 802.11p VANETs [C]//12th Workshop on Positioning, Navigation and Communication. Dresden, Germany, 2015 |
| [39] | COHN D, GHAHRAMANI Z, JORDAN M J . Active Learning with Statistical Models[J]. Journal of Artificial Intelligence Research, 1996,4:129-145. DOI: 10.1613/jair.295 |
| [40] | COHN D, ATLAS L, LADNER R . Improving Generalization with Active Learning[J]. Machine Learning, 1994,15(2):201-221. DOI: 10.1007/bf00993277 |
| [41] | SETTLES B . Active Learning Literature Survey [R/OL]. ( 2010- 01- 26). http://burrsettles.com/pub/settles.activelearning.pdf |
| [42] | ROCKL M, STRANG T, KRANZ M. V2V Communications in Automotive Multi-Sensor Multi-Target Tracking [C]//IEEE 68th Vehicular Technology Conference. Calgary, Canada, 2008: 1-5. DOI: 10.1109/VETECF.2008.440 |
| [43] | GRZYWACZEWSKI A. NVIDIA Corporation: Training AI for Self-Driving Vehicles: the Challenge of Scale [R/OL]. (2017). https://devblogs.nvidia.com/parallelforall/training-self-driving-vehicles-challenge-scale |
| [44] | LIU S S, TANG J, ZHANG Z , et al. Computer Architectures for Autonomous Driving[J]. Computer, 2017,50(8):18-25. DOI: 10.1109/mc.2017.3001256 |
| [45] | HUANG C, LU R X, CHOO K-K R. Vehicular Fog Computing: Architecture, Use Case, and Security and Forensic Challenges[J]. IEEE Communications Magazine, 2017,55(11):105-111. DOI: 10.1109/mcom.2017.1700322 |
| [46] | KONG L H, KHAN M K, WU F , et al. Millimeter-Wave Wireless Communications for IoT-Cloud Supported Autonomous Vehicles: Overview, Design, and Challenges[J]. IEEE Communications Magazine, 2017,55(1):62-68. DOI: 10.1109/mcom.2017.1600422cm |
| [47] | CARROLL R J, RUPPERT D, CRAINICEANU C M , et al. Measurement Error in Nonlinear Models: A Modern Perspective[M]. London, UK: Chapman and Hall/CRC, 2006 |
| [48] | BATTISTELLI G, CHISCI L, FANTACCI C , et al. Networked Target Tracking with Doppler Sensors[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015,51(4):3294-3306. DOI: 10.1109/taes.2015.140340 |
| [49] | HASSIBI B, SAYED A H, KAILATH T. Indefinite-Quadratic Estimation and Control: A Unified Approach to H2 and H-infinity Theories [M]. Philadelphia, USA: SIAM, 1999:vol 16 |
| [50] | KAILATH T, SAYED A H, HASSIBI B . Linear Estimation[M]. Upper Saddle River, USA: Prentice Hall, 2000 |
| [1] | CHEN Jiajun, GAO Yin, LIU Zhuang, LI Dapeng. Future Vision on Artificial Intelligence Assisted Green Energy Efficiency Network [J]. ZTE Communications, 2023, 21(2): 34-39. |
| [2] | AWADA Uchechukwu, ZHANG Jiankang, CHEN Sheng, LI Shuangzhi, YANG Shouyi. Machine Learning Driven Latency Optimization for Internet of Things Applications in Edge Computing [J]. ZTE Communications, 2023, 21(2): 40-52. |
| [3] | CAI Weibo, YANG Shulin, SUN Gang, ZHANG Qiming, YU Hongfang. Adaptive Load Balancing for Parameter Servers in Distributed Machine Learning over Heterogeneous Networks [J]. ZTE Communications, 2023, 21(1): 72-80. |
| [4] | ZHAO Zipiao, ZHAO Yongli, YAN Boyuan, WANG Dajiang. Auxiliary Fault Location on Commercial Equipment Based on Supervised Machine Learning [J]. ZTE Communications, 2022, 20(S1): 7-15. |
| [5] | NAN Yucen, FANG Minghao, ZOU Xiaojing, DOU Yutao, Albert Y. ZOMAYA. A Collaborative Medical Diagnosis System Without Sharing Patient Data [J]. ZTE Communications, 2022, 20(3): 3-16. |
| [6] | SHAO Hong, XIE Daxiong, HUANG Yihua. A Survey of Intelligent Sensing Technologies in Autonomous Driving [J]. ZTE Communications, 2021, 19(3): 56-63. |
| [7] | LIU Zhuang, GAO Yin, LI Dapeng, CHEN Jiajun, HAN Jiren. Enabling Energy Efficiency in 5G Network [J]. ZTE Communications, 2021, 19(1): 20-29. |
| [8] | Julian AHRENS, Lia AHRENS, Hans D. SCHOTTEN. A Machine Learning Method for Prediction of Multipath Channels [J]. ZTE Communications, 2019, 17(4): 12-18. |
| [9] | LIU Jianwei, YUAN Yifei, HAN Jing. A Case Study on Intelligent Operation System for Wireless Networks [J]. ZTE Communications, 2019, 17(4): 19-26. |
| [10] | HAN Bin, Hans D. SCHOTTEN. Machine Learning for Network Slicing Resource Management:A Comprehensive Survey [J]. ZTE Communications, 2019, 17(4): 27-32. |
| [11] | XUE Songyan, LI Ang, WANG Jinfei, YI Na, MA Yi, Rahim TAFAZOLLI, Terence DODGSON. To Learn or Not to Learn:Deep Learning Assisted Wireless Modem Design [J]. ZTE Communications, 2019, 17(4): 3-11. |
| [12] | Mohammed SEID, Stephen ANOKYE, SUN Guolin. Machine Learning Based Unmanned Aerial Vehicle Enabled Fog-Radio Aerial Vehicle Enabled Fog-Radio Access Network and Edge Computing [J]. ZTE Communications, 2019, 17(4): 33-45. |
| [13] | JIN Yichao, WEN Yonggang. When Machine Learning Meets Media Cloud: Architecture, Application and Outlook [J]. ZTE Communications, 2018, 16(3): 30-39. |
| [14] | Philip Pietraski and I-tai Lu. Guest Editorial: Millimeter Wave Communication for Cellular and Cellular-802.11 Hybrid Networks [J]. ZTE Communications, 2012, 10(4): 1-2. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||

